Research
FES-Soft Exosuit hybrid assistive system
1. Adaptive FES
We present an adaptive knee-joint based Functional Electrical Stimulation (FES) method to correct the foot drop of paretic patients during the swing phase. The rationale behind the adaptive FES is to amplify dorsiflexor stimulation in the late swing when it is most needed in order to face the increased plantar flexor co-contraction as gastrocnemius muscles are stretched by knee re-extension. To accurately detect the swing phase (i.e., toes off (TO) and initial contact (IC), a novel algorithm is proposed by using a foot-mounted inertial measurement unit (IMU). The proposed strategy is verified by experiments conducted with three healthy subjects and three paretic patients. The experimental results show that highly accurate detection of TO/IC can be achieved under different walking speeds and foot contact conditions (normal and abnormal gaits). The clinical experimental results with paretic patients also reveal that similar effects on ankle dorsiflexion can be observed during mid and late swing using the proposed adaptive FES with respect to the classical FES method, while the adaptive FES used lower stimulation intensity.
Code avaliable at Github
W. Huo, V. Arnez-Paniagua, M. Ghedira, Y. Amirat, J. -M. Gracies and S. Mohammed, "Adaptive FES Assistance Using a Novel Gait Phase Detection Approach," 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 2018, pp. 1-9
2. Hybrid FES-Soft Exosuit System
Foot drop and slow walking are two common characteristics of stroke-induced hemiparetic gaits. Recently, various assistive methods have been proposed for improving walking in post-stroke patients using functional electrical stimulation (FES), ankle exoskeleton, or a combination of the FES and exoskeleton. However, it is still challenging to correct the foot drop and improve the patient's walking speed due to the gait diversity and walking-speed variability. We present a hybrid FES-soft exosuit system, using FES to provide dorsiflexion assistance in the swing phase for foot drop correction and a soft exosuit to provide plantarflexion assistance in the late stance phase for forward propulsion reinforcement. Meanwhile, we propose an individualized assistive strategy by combining a preference-based control approach for the soft exosuit and an adaptive FES control method. The proposed methods were evaluated via experiments with two post-stroke patients. The results show that the maximum dorsiflexion angles of both patients are significantly increased by 5.5° on average with assistance. Additionally, clinically meaningful increases in walking speed (0.2 m/s on average) can be observed. It demonstrated the developed FES-soft exosuit system can effectively correct the hemiparetic gait and help stroke patients walk faster.

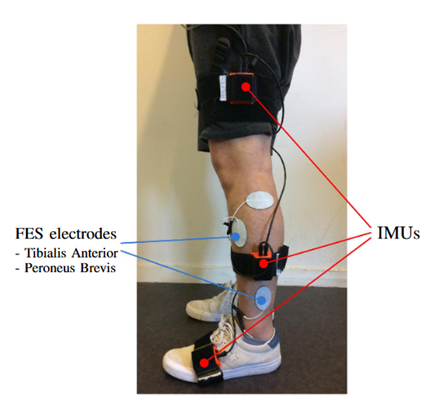
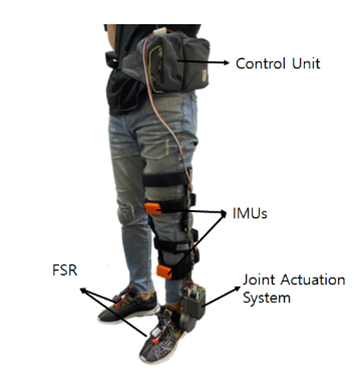
The developed hybrid FES-soft exosuit system. (a) the 16-channel FES stimulator and the electrode placements. (b) the overall view of the soft exosuit system. (c) the devices inside the backpack. (d) shank and foot straps.
3. Optimal Hybrid FES-Orthosis Assistance
As a life-threatening disease, stroke can lead to long-term problems affecting the patients’ daily living ability. A common problem facing post-stroke patients is foot drop. An emerging modality of interest for correcting the foot drop is to combine both actuated ankle-foot orthosis (AAFO) and functional electrical stimulation (FES). Such a hybrid assistive system not only ensures effective assistance but also can avoid fast muscular fatigue due to excessive muscular stimulation. Due to the significant changes in the ankle joint’s kinematics and kinetics with gait cycles, optimization control strategies for hybrid AAFO and FES systems are highly demanded. However, it is challenging to develop accurate gait phase detection algorithms to guide the control of AAFO and FES while ensuring robustness with respect to the diversity and variability of patients’ gaits. We present a novel swing sub-phase detection algorithm based on a moving average convergence divergence (MACD) indicator. The proposed detection algorithm uses only information collected from the affected leg by means of two inertia measurement units (IMU) and the AAFO. Moreover, a gait-phase-based control strategy is developed to optimize the assistive effect of a hybrid AAFO and FES system. Experimental results with five healthy subjects show the potential of the proposed approaches in ensuring both satisfactory ankle joint trajectory tracking and an effective reduction in stimulation intensity compared to the use of conventional FES assistance.
P. -G. Jung, W. Huo, H. Moon, Y. Amirat and S. Mohammed, "A Novel Gait Phase Detection Algorithm for Foot Drop Correction through Optimal Hybrid FES-Orthosis Assistance," 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi'an, China, 2021, pp. 10391-10397