Research
Motion Intention Estimation
We proposed an sEMG-driven state-space model combined with a surface electromyography (sEMG) decomposition algorithm to improve the accuracy of knee joint movement estimation based on single-channel sEMG signals measured from gastrocnemius. The proposed state-space model with the decomposed sub-channel sEMG signals can be robust to different walking speeds. Although a few studies attempted to use single-channel sEMG signals to perform the classification of lower limb movement modes or the estimation of upper limb muscle force to the best of our knowledge, this is the first study to use single-channel sEMG signals to estimate the knee joint angles. When comparing the proposed method with the existing ones using multi-channel sEMG signals for knee joint movement estimation, the results showed that this method has significant potential benefits over multi-channel sEMG-based methods for joint angle estimation with mobile and wearable robotic devices in practice, which can largely reduce the calibration time and improve the wearer’s comfort.
1. Wearable Sensors
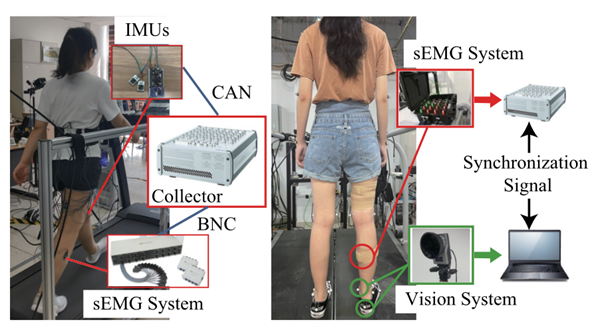
To meet the experimental requirements, we have built two sets of sensor systems. The first system, as shown on the left in the figure, is designed to meet the requirements of single-speed experiments. Two sEMG sensors (acquiring sEMG signals under a sample rate of 5 kHz) and two inertial measurement units (acquiring knee joint angle under a sample rate of 100 Hz) were attached to the subject’s muscles (lateral gastrocnemius (LG) and medial gastrocnemius (MG)) and right lower limb (thigh and shake), respectively. All the signals were simultaneously and synchronously collected by a real-time target machine (dSPACE). For multi-speed experiments, another experimental setup with an sEMG system and a vision system was utilized, as shown on the figure's right. During the multi-speed experiments, two sEMG sensors (a sample of rate 5 kHz) and 27 markers (acquiring knee joint angle under a sample of rate 100 Hz) were attached to the subject’s muscles (same as the single-speed experiment) and body (16 worn on the lower limb, 8 worn on the arm, 3 worn on the trunk), respectively. A synchronization signal was applied to collect all the signals synchronously.
2. Decomposing and extracting of muscular information
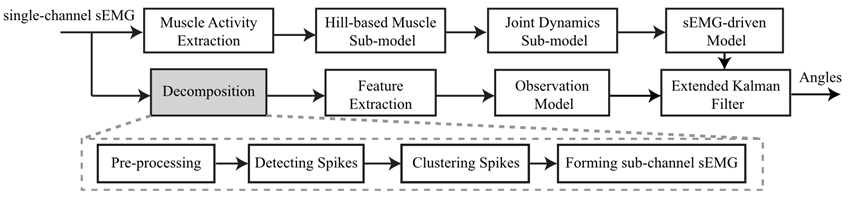
The process of decomposing single-channel sEMG signals has four steps, namely pre-processing, detecting spikes, clustering spikes and forming sub-channel sEMG. In pre-processing, a second-order differentiator filters the raw sEMG signals to remove background noise and improve the signal-to-noise ratio. Detecting spikes mainly involves calculating a detection threshold and determining peak positions. The spikes are detected if the filtered signals are over the threshold. After detecting, K-means is used to classify n spike vectors into m clusters determined in advance, where m presents the sub-channel number. Then, the spikes from the same cluster are reordered by their positions in the original sEMG signals and are placed in this sequence. The values on other positions of this sequence are set as zero. Therefore, m sequences are generated, i.e., decomposed m sub-channel sEMG.
3. Modeling of sub-muscle and intention estimation results

A state-space model consisting of an sEMG-driven model and an observation model is proposed to estimate the knee joint angle. The sEMG-driven model and observation model are established based on a Hill-based muscle sub-model and the extracted features from sub-channel sEMG signals, respectively. The effectiveness of the method was evaluated via both single and multi-speed walking experiments with seven and four healthy subjects, respectively. The results showed that the normal root-mean-squared error of the estimated knee joint angle using the method could be limited to 15%. Moreover, this method is robust concerning variations in walking speeds. The estimation performance of this method, i.e., normal root-mean-squared error (NRMSE), correlation coefficient (CC), and R-Square (R2) was comparable to that of state-of-the-art studies using multi-channel sEMG.
4. Translational applications
In China, the number of patients suffering from stroke is over 13.00 million. Many stroke survivors suffer from knee impairments, which makes walking difficult or even impossible. Knee exoskeletons can provide extension assistance for these patients to perform daily life activities, such as walking and standing. Most of these devices face the challenge of how to ensure accurate and safe human-robot interaction (HRI). As an effective means for estimating human state/intention in HRI, sEMG-based HRI has great potential to decode human movement intention, including discrete and continuous movements, making the robotic devices consistent with human movement. Our belief is to extract as much muscle information as possible with the minimum number of electrode sensors, ensuring comfort while accurately and continuously estimating human motion intent, providing the optimal assistive reference curve for knee exoskeletons, and aiding patients in regaining independent walking ability.
S. Zhang, N. Yu, Jinhui Guo, W. Huo*, J. Han, “Single-channel sEMG-based estimation of knee joint angle using a decomposition algorithm with a state-space model”, IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol.31, pp. 4703-4712, 2023.