Research
Wearable sensor design
1. Human Joint Torque Modelling With MMG and EMG During Lower Limb Human-Exoskeleton Interaction
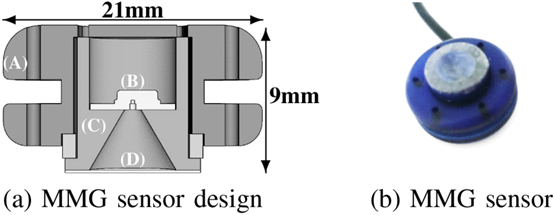
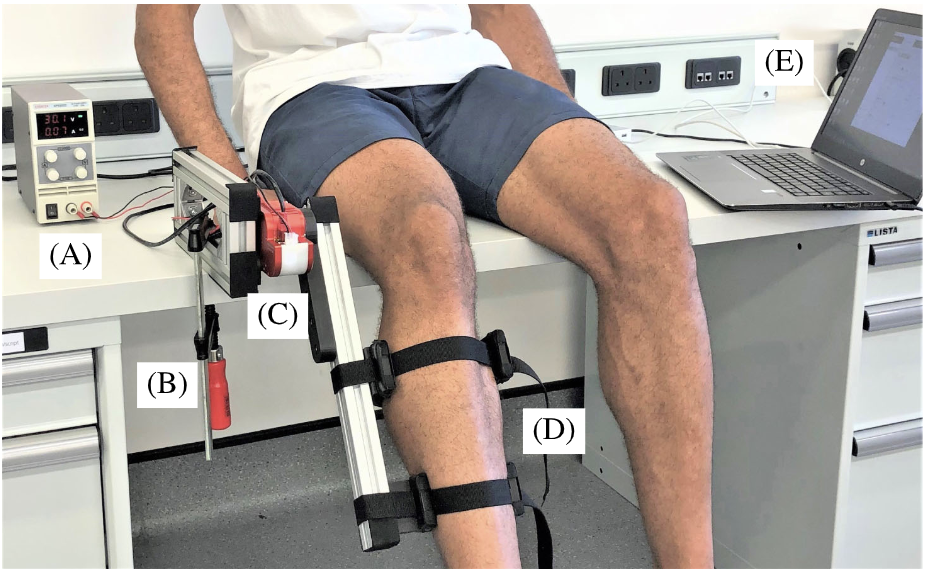
Human-robot cooperation is vital for optimising powered assist of lower limb exoskeletons (LLEs). Robotic capacity to intelligently adapt to human force, however, demands a fusion of data from exoskeleton and user state for smooth human-robot synergy. Muscle activity, mapped through electromyography (EMG) or mechanomyography (MMG) is widely acknowledged as usable sensor input that precedes the onset of human joint torque. However, competing and complementary information between such physiological feedback is yet to be exploited, or even assessed, for predictive LLE control. We investigate complementary and competing benefits of EMG and MMG sensing modalities as a means of calculating human torque input for assist-as-needed (AAN) LLE control. Three biomechanically agnostic machine learning approaches, linear regression, polynomial regression, and neural networks, are implemented for joint torque prediction during humanexoskeleton interaction experiment
C. Caulcrick, W. Huo*, W. Hoult, R.Vaidyanathan, “Human Joint Torque Modelling with MMG and EMG during Lower Limb Human-Exoskeleton Interaction”, IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 7185 - 7192, 2021.